Onderzeeboot
Een onderzeeboot, onderzeeër of duikboot, is een vaartuig dat zich onder water kan voortbewegen. Er zijn belangrijke militaire toepassingen, wetenschappelijke (studie van de zee onder water, waaronder de diepzee), en in beperkte mate toeristische. De term submersible wordt enerzijds gebruikt als algemenere term (hoeft zichzelf niet te kunnen voortbewegen), anderzijds specifiek voor voertuigen onder water die zich niet of beperkt zelfstandig kunnen voortbewegen en een begeleidend schip nodig hebben.[1] Onderscheiden worden daarbij bemande (human-occupied vehicle, HOV) en onbemande (remotely operated vehicle, ROV).

_at_periscope_depth_off_Malaysia.jpg)
Voor miltaire toepassingen is de mogelijkheid belangrijk om lang of kort onzichtbaar te zijn, bijvoorbeeld totdat de opdracht komt om tot de aanval over te gaan.
Manieren om een diep varende onderzeeboot op te sporen zijn met behulp van actieve ("pingen") of passieve (luisteren) sonar, of door het meten van storingen in het aardmagnetisch veld (Magnetic Anomaly Detection - MAD). Een onderzeeboot die aan de oppervlakte of nog heel dicht daaronder vaart is op de radar zichtbaar en ook nog met het oog, vooral vanuit de lucht. Het opsporen, aanvallen en vernietigen van onderzeeboten wordt onderzeebootbestrijding (Engels: Anti-Submarine Warfare, ASW) genoemd.
Geschiedenis
bewerken


Van Alexander de Grote gaat het verhaal dat hij (300 v.Chr.) al afdaalde in een duikerklok naar de bodem van de zee. Of dat op waarheid berust is niet zeker. Vast staat dat duikerklokken en vergelijkbare vindingen al lang bekend zijn, onder andere bij parelduikers.
Het eerste gedocumenteerde vaartuig dat werkelijk onder water voortbewoog is ontworpen en gebouwd door de Nederlandse uitvinder Cornelis Drebbel.[2] Tussen 1620 en 1624 nam Drebbel proefnemingen met een onderzeeboot op de Theems. Voortbewogen door enkele roeiers heeft dit vaartuig daadwerkelijk een aanzienlijke afstand onder water afgelegd, op dieptes variërend tussen vier en vijf meter. Er zijn drie prototypes gebouwd en getest die tot drie uur onder water konden blijven. Hoewel het bestaan van zuurstof en kooldioxide nog onbekend was, is Drebbel in staat geweest zijn alchemistische kennis te gebruiken voor het maken van een toestel dat kooldioxide afving en zuurstof afgaf. Zijn vindingen zijn nooit in praktijk toegepast.
In 1776 werd voor het eerst een onderwatervaartuig gebruikt bij oorlogvoering. De Turtle, ontworpen door David Bushnell, viel het Britse fregat HMS Eagle aan. De aanval mislukte doordat de springlading niet aan de romp bevestigd kon worden.
Was de Turtle nog een duikerklok met handaandrijving, de Fransen legden zich toe op vaartuigen die al meer op echte onderzeeboten leken. De Amerikaan Robert Fulton bouwde in 1801, in Franse dienst, de Nautilus (een naam die nadien wel vaker geassocieerd wordt met onderzeeboten).
Narcís Monturiol bouwde in 1859 de Ictíneo I, bedoeld voor de koraalvisserij. In 1864 volgde de Ictíneo II.
De eerste op latere onderzeeboten gelijkende vaartuigen die aan de strijd deelnamen werden gebruikt tijdens de Amerikaanse Burgeroorlog. De handaangedreven CSS Hunley bracht als eerste onderzeeboot een vijandelijk schip tot zinken in 1864. Na deze raid zonk de Hunley naar de zeventig meter diepe zeebodem. De acht bemanningsleden kwamen om. Het wrak werd in 2000 geborgen.
In 1888 bouwde de Spaanse ingenieur Isaac Peral de eerste onderzeeboot die volledig militair uitgerust was en torpedo's kon afvuren. Tevens was dit de eerste elektrisch aangedreven onderzeeboot en de eerste onderzeeboot met een betrouwbaar onderwater navigatiesysteem. Dit was ook de snelste onderzeeboot tot dan toe gebouwd. De Peral-onderzeeër wordt ook wel de eerste U-boot genoemd.
De ontwikkeling van de onderzeeër kwam in een stroomversnelling door de Ierse uitvinder John Philip Holland. In 1897 ging de Holland VI te water. Hij had een waterverplaatsing van 45 ton en kon als eerste langere tijd onder water varen. Hij was voorzien van een benzine- en een elektromotor en batterijen. De benzinemotor zorgde voor de voortstuwing boven water en laadde de batterijen op. De elektromotor trok energie van de batterijen en dreef de schroef aan onder water. De bewapening bestond uit een torpedobuis en voldoende ruimte voor drie torpedo’s. Dit exemplaar werd gekocht door de Amerikaanse marine op 11 april 1900. Na uitvoerige tests werd het op 12 oktober 1900 in dienst gesteld onder de naam USS Holland.
Duikboten en onderzeeboten
bewerken

_and_USS_Frank_Cable_(AS-40)_at_Apra_Harbor,_Guam,_on_23_May_2002_(6640652).jpg)
De Nederlandse marine maakt onderscheid tussen enerzijds duikboten en anderzijds onderzeeboten. Volgens dit onderscheid is een duikboot een vaartuig dat zich voornamelijk boven water verplaatst en pas onder water gaat om aan tegenstanders (bijvoorbeeld torpedobootjagers) te ontsnappen of voor het aangaan van een aanval. Tot aan het eind van de Tweede Wereldoorlog was dit de gewone werkwijze voor duikboten. De topsnelheid was aan de oppervlakte doorgaans groter dan onder water. De U-boot is een typisch voorbeeld van een duikboot.
Een onderzeeboot daarentegen blijft langer onder water en komt slechts aan de oppervlakte zodra dat nodig is. Dit werd pas mogelijk door de toepassing van een snuiverinstallatie, al in 1939. Aangezien de Nederlandse marine de eerste was die de snuiver toepaste en zij zich ervan bewust was dat haar duikboten daardoor langer onder water konden blijven dan de vaartuigen van andere mogendheden is zij dit onderscheid gaan maken.
Dit strikte onderscheid tussen duikboot en onderzeeboot is elders onbekend.
Door de introductie van kernenergie omstreeks 1955 werden nog veel langere duiktijden mogelijk.
Techniek
bewerkenEnergiebron
bewerkenWindkracht en mankracht
bewerkenDe voortstuwing was tot het eind van de 19e eeuw een groot probleem. De (primitieve) vaartuigen die van handkracht gebruik maakten waren zeer beperkt in snelheid en actieradius. Een enkel vaartuig gebruikte dan wel een zeil, maar het verrassingseffect was dan verloren.
Stoom
bewerkenDatzelfde gold voor het enkele model dat omstreeks 1860 een stoommachine als voortstuwing had. Door de dikke rookpluim was dat schip al van ver waar te nemen.
Diesel en accu's
bewerkenPas aan het einde van de 19e eeuw kwam er met elektromotoren een acceptabele krachtbron beschikbaar. De beperkte capaciteit van de accu's verhinderde echter nog steeds een langdurig verblijf op zee. Deze beperking werd opgelost door het installeren van een dieselmotor, zodat de elektrische aandrijving alleen voor de onderwatervaart benut hoefde te worden. Boven water varend kon de onderzeeboot dan de accu's opnieuw opladen. Deze dieselelektrische voortstuwing werd in de 20e eeuw snel gemeengoed.
Snuiver
bewerkenDesondanks bleef men verder zoeken naar een voortstuwing die een permanent verblijf onder water mogelijk kon maken. De uitvinding van de snuiver (1938) was al een belangrijke vooruitgang. De snuiver bleef echter boven water zichtbaar, zodat er nog steeds geen sprake was van een echte onderzeeër.
Waterstofperoxide
bewerkenAan het eind van de Tweede Wereldoorlog was de Duitse Kriegsmarine al ver gevorderd met de toepassing van waterstofperoxide als oxidator. Hierdoor was geen aanvoer van buitenlucht meer nodig. Het brandgevaar verhinderde echter een verdere ontwikkeling na de oorlog.
Kernenergie
bewerkenDe toepassing van kernenergie vanaf 1954 maakte dat de inzet van de onderzeeboot in feite alleen werd beperkt door het uithoudingsvermogen van de bemanning. De USS Nautilus was de eerste operationele atoomonderzeeër. Ook tegenwoordig wordt er veel energie gestopt in het onderzoek naar "air independent"-voortstuwingssystemen.
Voortstuwing en besturing
bewerkenEen onderzeeboot heeft een schroef om voor- en achteruit te varen. De diepte onder water wordt geregeld met duikroeren. Door waterballast in te nemen of uit te stoten kan hij duiken en boven water komen.
De vorm van de schroef van een onderzeeboot is een van de best bewaarde militaire geheimen omdat experts uit de vorm van de schroef veel te weten kunnen komen over het cavitatiegedrag van de schroef.
Diepteregeling
bewerkenEen onderzeeboot heeft een aantal ballasttanks voor de diepteregeling. Om onderwater te gaan worden de hoofdtanks gevuld met water. Daarna worden de trimtanks afgetrimd op neutrale vaart, dat wil zeggen de onderzeeboot net zo zwaar is als het water dat hij verplaatst waardoor hij volgens de wet van Archimedes in rust niet zal stijgen of dalen.
Om te stijgen of te dalen wordt gebruikgemaakt van de duikroeren. Deze bevinden zich bij aan weerszijden van de romp (voor en achter), of in het midden, aan weerszijden van de toren. Een onderzeeboot heeft dus snelheid nodig om de diepte te kunnen regelen.
-
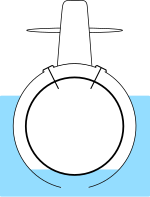 Drijvend met gesloten kleppen
Drijvend met gesloten kleppen -
 Onder water gaan met open kleppen
Onder water gaan met open kleppen -
 Onder water met volle tanks en gesloten kleppen
Onder water met volle tanks en gesloten kleppen



Risico's
bewerkenVoor elk type onderzeeboot geldt een maximaal dieptebereik. Hoe groot dit bereik is, is een van de zorgvuldigst bewaarde geheimen. Aan boord weet alleen de commandant hoe diep zijn schip nog veilig kan duiken. Als het schip onder deze grens komt, wordt de romp samengedrukt (dit heet ook wel implosie; het schip implodeert). De bemanning komt daarbij vrijwel altijd om het leven. De sterkte van de romp van de onderzeeboot is mede afhankelijk van de ronde vorm. Het zal duidelijk zijn dat vervorming van deze romp, ook al is deze minimaal, grote invloed kan hebben op de toelaatbare duikdiepte.
Moderne onderzeeboten kunnen in ieder geval dieptes van enige honderden meters bereiken; van de Russische militaire onderzeeboot Komsomolets (circa 1989) is bekend dat het diepterecord op 1000 m lag. De bodem van de Marianentrog bij de Filipijnen, die ongeveer 10,9 km diep is, werd in 1960 door Jacques Piccard in zijn bathyscaaf Trieste bereikt.
Om bij ernstige schade, waarbij het schip dreigt vol te lopen, nog een kans van overleven te hebben, zijn onderzeeboten meestal verdeeld in verschillende compartimenten, die door waterdichte schotten en deuren van elkaar zijn gescheiden.
Ligt het schip beschadigd op de bodem, dan is er - afhankelijk van de ernst van de beschadiging en van de diepte - soms nog ontsnapping mogelijk. Met een reddingsduikboot of speciale vesten of duikerpakken die enige overdruk van het water compenseren, kunnen bemanningsleden de onderzeeboot verlaten, als ze tenminste uit de compartimenten weten te ontsnappen. Ze worden dan naar de oppervlakte gedreven.
Toepassing
bewerkenEen onderzeeboot kan torpedo's en geleide wapens (bijvoorbeeld kruisraketten) afschieten. De wijze van inzetten is onder andere afhankelijk van het type onderzeeboot. Zo worden onderscheiden:
- Minionderzeeboten
- Voor offensieve taken in kustwateren. In de Tweede Wereldoorlog is door diverse partijen van minionderzeeboten gebruikgemaakt. Tegenwoordig is dit type niet meer in gebruik. Wel bestaan er nog zeer gespecialiseerde minionderzeeboten voor reddingsacties op de zeebodem.
- Kustonderzeeboten
- Kleinere vaartuigen (ca. 500 tot 1500 ton waterverplaatsing) voor surveillance- en aanvalstaken in kustwateren en besloten zeeën, zoals de Oostzee en de Middellandse Zee.
- Het ballistische raket-type of strategische aanvalsonderzeeboten
- Deze lanceren intercontinentale ballistische (kern-)raketten, zoals de Polaris, Poseidon en Trident. Onderzeeboten van dit type zijn ca. 6500 tot 22.000 ton groot en vrijwel altijd van nucleaire aandrijving voorzien. Het middengedeelte van het schip bevat 12 tot 24 lanceerbuizen voor raketten.
- Het hunter/killer of attack-type
- Voor het actief opsporen en bestrijden van vijandelijke onderzeeboten en oppervlakteschepen (zoals de hierboven getoonde onderzeeboot van de Los Angelesklasse). Dit zijn schepen met ca. 3500 tot 8000 ton waterverplaatsing en voorzien van nucleaire aandrijving. Een aantal hunter/killers heeft lanceerbuizen voor kruisraketten.
- Elektrisch aangedreven minionderzeeboten met beperkte actieradius in toeristische oorden, o.a. in Egypte en in Mexico.
Dieselelektrische onderzeeboten zijn een zeldzaamheid geworden. Dit zijn vaartuigen met maximaal 3000 ton waterverplaatsing, die de taken toebedeeld krijgen van de hunter-killers en kunnen opereren in diepe kustzeeën. Door hun vermogen zich geruisloos te verplaatsen (vaak veel stiller dan een nucleair aangedreven onderzeeboot) zijn ze lastig te ontdekken voor tegenstanders. Deze eigenschap maakt ze bijzonder geschikt om inlichtingen te verzamelen dicht bij kusten, zelfs binnen de territoriale wateren, van andere landen. Binnen de NAVO hebben Nederland (4), Duitsland (4), Spanje (4), Portugal (2), Italië (6), Griekenland (8) en Canada (4) vaartuigen van dit type. Daarbuiten onder andere nog Australië, Taiwan en Japan.
De atoomonderzeeër Koersk, die in 2000 verging, was een hunter/killer met lanceerbuizen voor zware antischipkruisraketten. Dit type is specifiek ontwikkeld voor inzet tegen vliegdekschepen.
Constructeurs wereldwijd
bewerkenVan zes landen is bekend dat ze nucleair aangedreven onderzeeboten bezitten: de Verenigde Staten, het Verenigd Koninkrijk, Frankrijk, Rusland, China en India.
De Verenigde Staten bouwen al sinds de jaren zestig uitsluitend nucleaire onderzeeboten en hebben geen ervaring meer met het bouwen van en de mogelijkheden van conventionele onderzeeboten. Het Verenigd Koninkrijk begon einde jaren tachtig aan de bouw van een nieuwe serie dieselelektrische onderzeeboten (Type 2400, Upholderklasse), maar besloot na de val van het IJzeren Gordijn zich geheel toe te leggen op nucleaire onderzeeboten. De vier afgebouwde exemplaren van de Upholderklasse zijn verkocht aan Canada.
Het aantal landen dat de kennis heeft om moderne conventionele onderzeeboten te bouwen is beperkt. In elk geval Nederland (voorheen bij Wilton-Fijenoord en RDM), Duitsland (Howaldtswerke-Deutsche Werft (HDW) onderdeel van ThyssenKrupp Marine Systems), Frankrijk (DCN), Japan en Zweden (Kockums). De onderzeebootbouw in Nederland is thans goeddeels verdwenen, de kennis ervan is weggevloeid bij de werven maar is nog wel aanwezig bij de Koninklijke Marine en bij het MARIN. Het Duitse HDW heeft het Zweedse Kockums overgenomen, waardoor het een vooraanstaande positie heeft verworven.
De onderzeeboten die andere landen in bezit hebben worden vaak gebouwd in samenwerking met het Duitse HDW (Israël, Griekenland, Zuid-Korea) of het Franse DCN (Pakistan, Spanje, Maleisië, India, Chili). Kockums bouwt voor de Zweedse marine en heeft destijds een werf in Australië overgenomen. Hier zijn de onderzeeboten voor de Australische marine gebouwd. Een vergelijkbare optie werd door HDW gevolgd, dat een Griekse werf overnam. Italië heeft na de Tweede Wereldoorlog nog aan aantal vaartuigen naar eigen ontwerp gebouwd, maar gebruikt inmiddels ook Duitse ontwerpen. Denemarken en Noorwegen hebben nog zelf (kust-)onderzeeboten gebouwd, maar ook die waren gebaseerd op Duitse ontwerpen.
Nederland heeft in de jaren tachtig van de 20e eeuw twee onderzeeboten aan Taiwan geleverd. Door de reactie van China daarop (een handelsboycot) hebben achtereenvolgende kabinetten daarop geweigerd een exportvergunning af te geven voor een vervolgorder.
Zie ook
bewerkenLiteratuur
bewerken- Jalhay, P.C. en Wijn, J.J.A. (1997): Ik nader ongezien! De onderzeeboten van de Koninklijke Marine, ISBN 9067074624.
- Boeke, S. (2006): Onzichtbaar maar onmisbaar: De onderzeeboot en zijn proliferatie, Militaire Spectator 175, 198-208.
- de Bles, H., Boven, G. en Homburg, L. (2006): Onderzeeboten!, ISBN 9059941306.
Externe links
bewerken- (en) Overzicht Nederlandse onderzeeboten - dutchsubmarines.com
- Verkenner onderwater: Het belang van de onderzeeboot als inlichtingensensor - militairespectator.nl